
發表在《物理評論X》(Physical Review X)期刊上的一項新研究揭示,通過聲學信號交流的活性物質系統能夠自發形成多功能集體結構,并展現出如表型穩健性、集體決策和環境感知等涌現功能。 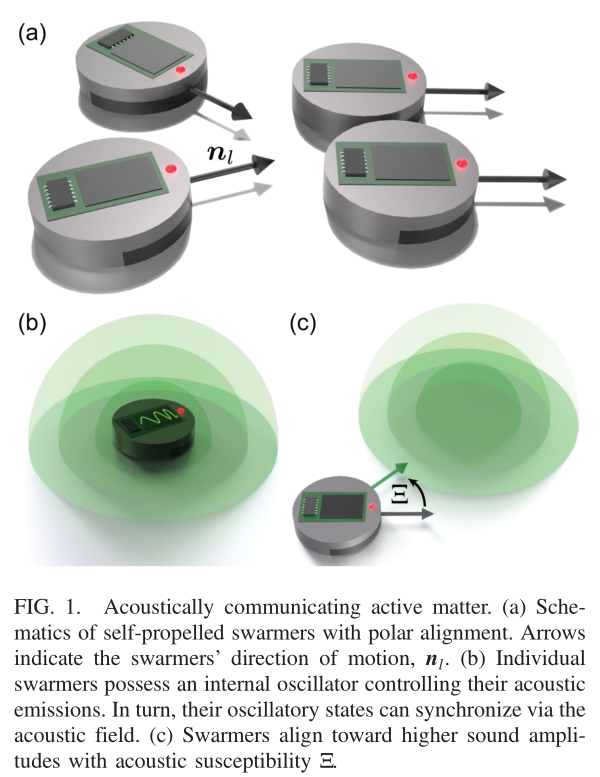
圖1 聲學通信活性物質。該圖展示了聲學通信活性物質系統的核心機制,包括智能體的極性運動特性、內部振蕩器與聲場的耦合關系,以及智能體對聲幅梯度的響應方式。 這項由德國路德維希 - 馬克西米利安大學、美國賓夕法尼亞州立大學等機構的研究人員合作完成的成果,為設計能執行復雜任務的聲學或電磁通信微型機器人集群提供了理論基礎。
在自然界中,蝙蝠和鯨魚等動物利用聲學信號交流以提升進化競爭力。受此啟發,研究團隊構建了一個由配備聲學發射器和探測器的活性智能體(swarmers)組成的集群系統。這些智能體通過調整發射頻率并向最強信號源遷移,對聲學場做出動態響應。
計算模擬顯示,系統能自組織形成多種形態結構,包括蛇形自推進實體、局部聚集物和旋轉環等,每種結構都具備獨特的功能特性。

圖2 聲學介質的聚集體形成。該圖展示不同時間點智能體的相位同步、聲場振幅變化及聚集過程,呈現了聲學相互作用如何驅動智能體從無序分布到形成單一持久集體聚集體的動態過程,驗證了聲學耦合在聚集過程中的關鍵作用。
研究的核心發現在于這些集體集群展現出的強大適應性與功能性。例如,集群在遭受強烈擾動后能自我再生,甚至可穿過狹窄通道后重新組裝;它們能在群體尺度上感知反射物體,并對外部聲學控制輸入做出協同響應。這種自我修復能力與環境適應性,類似于生物系統的進化優勢,但通過人工設計的聲學交互機制得以實現。
在對集體狀態的系統研究中,團隊識別出五種典型表型:
團塊(blob):低速度、高聲學敏感性下形成的局部聚集結構,中心存在 "起搏器" 區域,發射頻率約為單個智能體的 25 倍;
幼蟲(larva):不對稱結構,頭部存在極性缺陷,能緩慢遷移并吸收小集群,頻率可達單個智能體的 80 倍;
蛇形(snake):高速運動結構,無內部起搏器,依靠相位波同步推進,移動速度接近單個智能體;
銜尾蛇(ouroboros):幼蟲卷曲形成的環形結構(形象地說就是 “吃掉” 自己的尾巴以形成一個連續的環),這些銜尾蛇展示出周期性的相位波,相位波的傳播方向與智能體的運動方向通常相反;
團藻(volvox):中心同步區域被非相干振蕩外層包圍,類似耦合振蕩器網絡中的 "嵌合體狀態"。
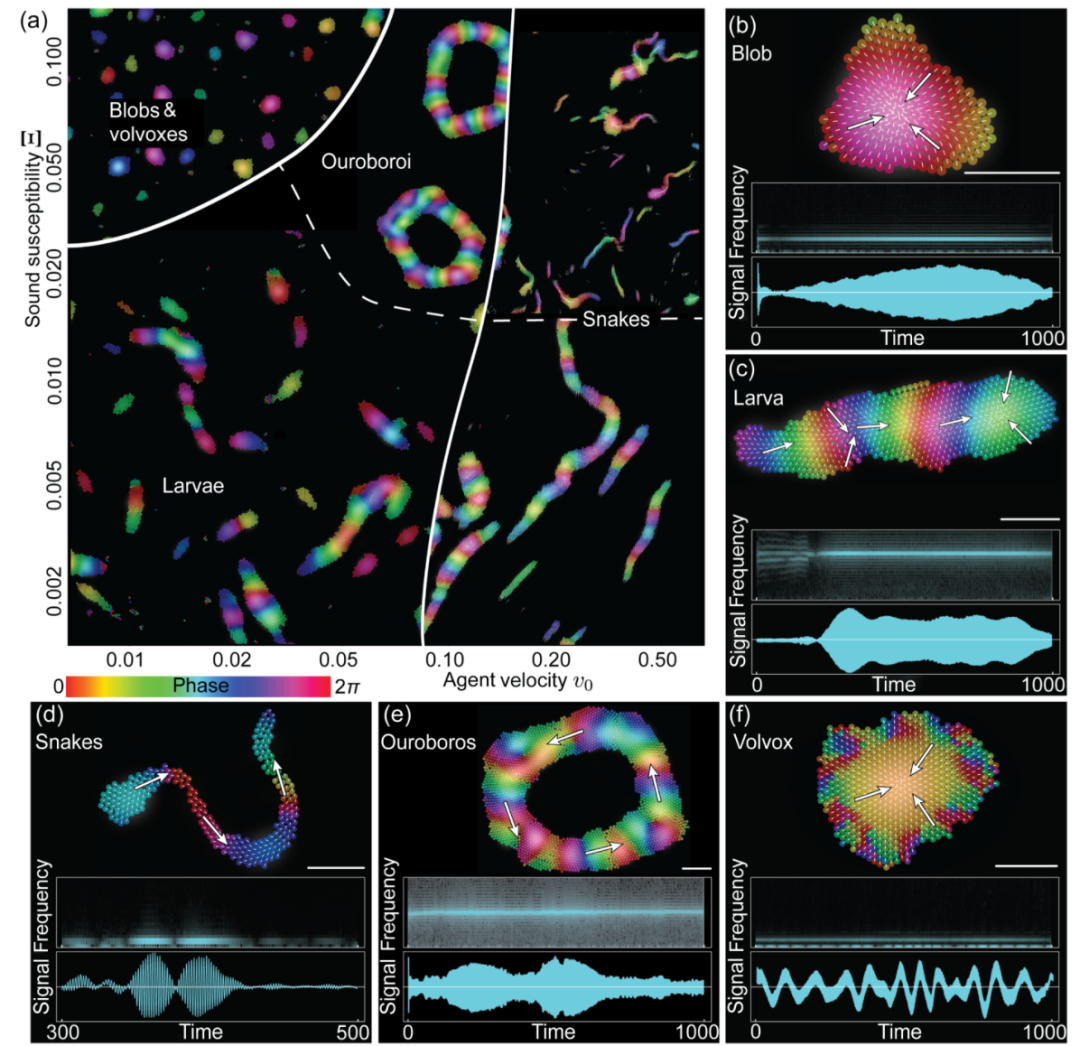
圖3 集體狀態的多樣性。(a)不同集體狀態與智能體自推進速度v0和聲信號對齊敏感性的關系相圖。(b)-(f)基于智能體模型的代表性解及其聲學特征(頻率分布和臨近位置測得的聲信號振幅)。智能體顏色表示振蕩器相位,白色箭頭突出局部平均智能體取向,白色標尺代表5單位長度。
這些結構的形成與智能體的運動速度、聲學敏感性等參數密切相關。通過量化集群極性序參數(Ψ???)和聚集度量(Ψ???),研究團隊繪制出清晰的相圖,揭示了不同表型之間的轉變規律。
研究證實,集群能通過聲學反射感知外部物體并改變行為模式 —— 幼蟲在探測到逼近物體時會解體為團塊,而團藻則會排出外圍非同步智能體。蛇形結構可穿越比自身直徑更窄的通道并恢復形態,幼蟲在頭部缺陷被破壞后能再生新的 "起搏器" 并重新吸收分散的智能體。
此外,研究還實現了通過外部聲學信號對集群的位置控制,展示了捕獲、運輸和釋放蛇形結構的精準操作,如下圖9所示。

圖8 對逼近物體的集體感知。(a)移動幼蟲對逼近物體的表型變化序列:探測到反射波后解體為團塊并排出外圍智能體。右側面板展示整個模擬域(L=50)的聲頻率、振幅和集群數量時間演化,紅線標記入侵物引入時刻,藍線對應快照時間。(b)局部集體解(團塊)對逼近入侵物的響應序列:反射物引入后聲發射振幅顯著變化,團藻排出外圍非同步智能體,尺寸減小。

圖9 涌現功能示例。(a)穩定蛇形結構穿過狹窄通道(灰色),最右側展示智能體通過率與通道寬度和蛇長的關系。(b)幼蟲再生被截斷的頭部:幼蟲集體速度與封閉極性缺陷位置呈飽和線性關系(右側),恢復過程軌跡回歸幼蟲特征速度行為(插圖彩色軌跡)。(c)遠距離聲學通信:兩個團藻通過發射聲波相互作用,維持穩定集群距離(聲學波長 Δ 的整數倍),藍線標記快照時間。(d)聲學束對蛇形結構的捕獲、運輸和釋放(“卵中蛇”):足夠大信標尺寸下控制協議穩定,控制速度可達單個智能體速度,右側為成功捕獲智能體比例。說明:通過系列功能實驗,展示了集體結構的環境適應(穿通道)、自我修復(再生)、群體通信(距離調控)和外部控制(捕獲運輸)能力,驗證了系統在實際應用中的潛力。
與依賴化學信號的傳統系統相比,聲學信號傳遞具有速度快、范圍廣的優勢。研究中的活性智能體通過聲波實現長距離非局部耦合,其粗化動力學速度遠超擴散介導的奧斯特瓦爾德熟化(Ostwald ripening)過程,且能在特定長度尺度穩定下來。
這種特性使系統在污染物覓食、集體威脅檢測和組織栓塞等應用場景中具有優勢。
研究團隊指出,通過微觀智能體間的簡單交互規則,系統無需外部監督即可涌現高級功能,這與神經網絡的工作原理相似,但極大降低了單個智能體的計算能耗。未來,這類聲學通信系統有望應用于危險或難以接近的環境中,如開發更先進的協同聲吶系統以識別反射物體特性并觸發相應行為。
更多信息:Alexander Ziepke et al, Acoustic Signaling Enables Collective Perception and Control in Active Matter Systems, Physical Review X (2025). DOI: 10.1103/m1hl-d18s
這項由德國路德維希 - 馬克西米利安大學、美國賓夕法尼亞州立大學等機構的研究人員合作完成的成果,為設計能執行復雜任務的聲學或電磁通信微型機器人集群提供了理論基礎。
在自然界中,蝙蝠和鯨魚等動物利用聲學信號交流以提升進化競爭力。受此啟發,研究團隊構建了一個由配備聲學發射器和探測器的活性智能體(swarmers)組成的集群系統。這些智能體通過調整發射頻率并向最強信號源遷移,對聲學場做出動態響應。
計算模擬顯示,系統能自組織形成多種形態結構,包括蛇形自推進實體、局部聚集物和旋轉環等,每種結構都具備獨特的功能特性。
圖2 聲學介質的聚集體形成。該圖展示不同時間點智能體的相位同步、聲場振幅變化及聚集過程,呈現了聲學相互作用如何驅動智能體從無序分布到形成單一持久集體聚集體的動態過程,驗證了聲學耦合在聚集過程中的關鍵作用。
研究的核心發現在于這些集體集群展現出的強大適應性與功能性。例如,集群在遭受強烈擾動后能自我再生,甚至可穿過狹窄通道后重新組裝;它們能在群體尺度上感知反射物體,并對外部聲學控制輸入做出協同響應。這種自我修復能力與環境適應性,類似于生物系統的進化優勢,但通過人工設計的聲學交互機制得以實現。
在對集體狀態的系統研究中,團隊識別出五種典型表型:
團塊(blob):低速度、高聲學敏感性下形成的局部聚集結構,中心存在 "起搏器" 區域,發射頻率約為單個智能體的 25 倍;
幼蟲(larva):不對稱結構,頭部存在極性缺陷,能緩慢遷移并吸收小集群,頻率可達單個智能體的 80 倍;
蛇形(snake):高速運動結構,無內部起搏器,依靠相位波同步推進,移動速度接近單個智能體;
銜尾蛇(ouroboros):幼蟲卷曲形成的環形結構(形象地說就是 “吃掉” 自己的尾巴以形成一個連續的環),這些銜尾蛇展示出周期性的相位波,相位波的傳播方向與智能體的運動方向通常相反;
團藻(volvox):中心同步區域被非相干振蕩外層包圍,類似耦合振蕩器網絡中的 "嵌合體狀態"。
圖3 集體狀態的多樣性。(a)不同集體狀態與智能體自推進速度v0和聲信號對齊敏感性的關系相圖。(b)-(f)基于智能體模型的代表性解及其聲學特征(頻率分布和臨近位置測得的聲信號振幅)。智能體顏色表示振蕩器相位,白色箭頭突出局部平均智能體取向,白色標尺代表5單位長度。
這些結構的形成與智能體的運動速度、聲學敏感性等參數密切相關。通過量化集群極性序參數(Ψ???)和聚集度量(Ψ???),研究團隊繪制出清晰的相圖,揭示了不同表型之間的轉變規律。
研究證實,集群能通過聲學反射感知外部物體并改變行為模式 —— 幼蟲在探測到逼近物體時會解體為團塊,而團藻則會排出外圍非同步智能體。蛇形結構可穿越比自身直徑更窄的通道并恢復形態,幼蟲在頭部缺陷被破壞后能再生新的 "起搏器" 并重新吸收分散的智能體。
此外,研究還實現了通過外部聲學信號對集群的位置控制,展示了捕獲、運輸和釋放蛇形結構的精準操作,如下圖9所示。
圖8 對逼近物體的集體感知。(a)移動幼蟲對逼近物體的表型變化序列:探測到反射波后解體為團塊并排出外圍智能體。右側面板展示整個模擬域(L=50)的聲頻率、振幅和集群數量時間演化,紅線標記入侵物引入時刻,藍線對應快照時間。(b)局部集體解(團塊)對逼近入侵物的響應序列:反射物引入后聲發射振幅顯著變化,團藻排出外圍非同步智能體,尺寸減小。
圖9 涌現功能示例。(a)穩定蛇形結構穿過狹窄通道(灰色),最右側展示智能體通過率與通道寬度和蛇長的關系。(b)幼蟲再生被截斷的頭部:幼蟲集體速度與封閉極性缺陷位置呈飽和線性關系(右側),恢復過程軌跡回歸幼蟲特征速度行為(插圖彩色軌跡)。(c)遠距離聲學通信:兩個團藻通過發射聲波相互作用,維持穩定集群距離(聲學波長 Δ 的整數倍),藍線標記快照時間。(d)聲學束對蛇形結構的捕獲、運輸和釋放(“卵中蛇”):足夠大信標尺寸下控制協議穩定,控制速度可達單個智能體速度,右側為成功捕獲智能體比例。說明:通過系列功能實驗,展示了集體結構的環境適應(穿通道)、自我修復(再生)、群體通信(距離調控)和外部控制(捕獲運輸)能力,驗證了系統在實際應用中的潛力。
與依賴化學信號的傳統系統相比,聲學信號傳遞具有速度快、范圍廣的優勢。研究中的活性智能體通過聲波實現長距離非局部耦合,其粗化動力學速度遠超擴散介導的奧斯特瓦爾德熟化(Ostwald ripening)過程,且能在特定長度尺度穩定下來。
這種特性使系統在污染物覓食、集體威脅檢測和組織栓塞等應用場景中具有優勢。
研究團隊指出,通過微觀智能體間的簡單交互規則,系統無需外部監督即可涌現高級功能,這與神經網絡的工作原理相似,但極大降低了單個智能體的計算能耗。未來,這類聲學通信系統有望應用于危險或難以接近的環境中,如開發更先進的協同聲吶系統以識別反射物體特性并觸發相應行為。